
Figure 1.
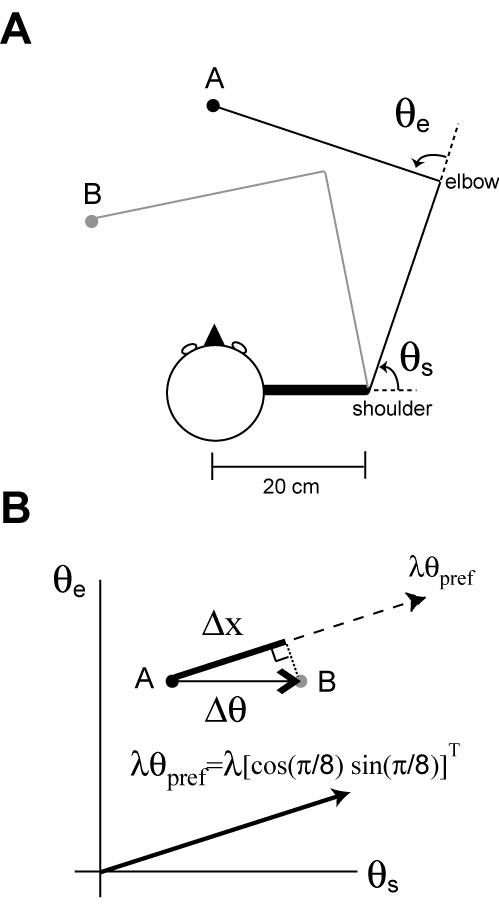
Transformation from a 2D arm movement to muscle length changes. (A) Top down view of the model arm that moves on a horizontal plane. θs is a shoulder joint angle and θs is an elbow joint angle. Pure shoulder flexion when moving from the point A to B. (B) A movement representation in the joint angle space for the movement in (a). This joint angle change (Δθ) from the point A to the point B induces a length change (Δx) for the muscle that is sensitive to the shoulder joint angle change. For example, the length change of the muscle whose preferred direction is[cos(π / 8) sin(π / 8]and moment arm is λ can be calculated by computing the inner product between Δθ and λθpref.