
Figure 2.
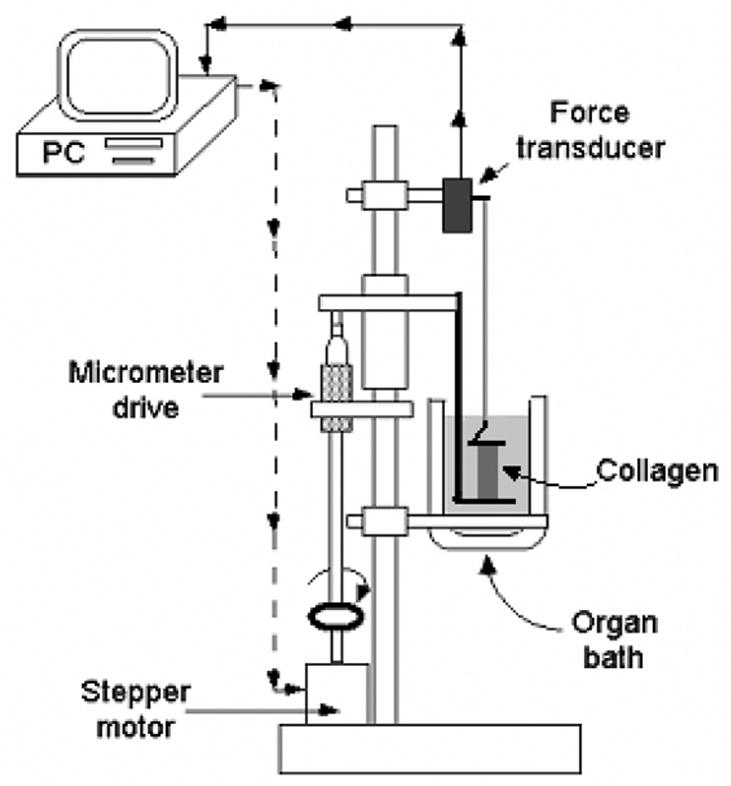
The experimental test apparatus included a temperature-controlled organ bath (Harvard Apparatus, South Natick, MA) and a pair of loading bars controlled by a stepper motor. The fixed bar was suspended from a force transducer (model 52-5945, Harvard Apparatus, South Natick, MA). The lower, movable bar was attached to a sliding element controlled by a stepper motor (P/N 1-19-3400, 24V DC, 1.8° step size, Howard Industry, St. Louis, MO) through a micrometer. The micro-stepping driver (IM483, Intelligent Motion Systems, Inc., Marlborough, CT) was controlled using the “experix” software system developed by William B. McConnaughey (sourceforge.net).