
Fig. 2.
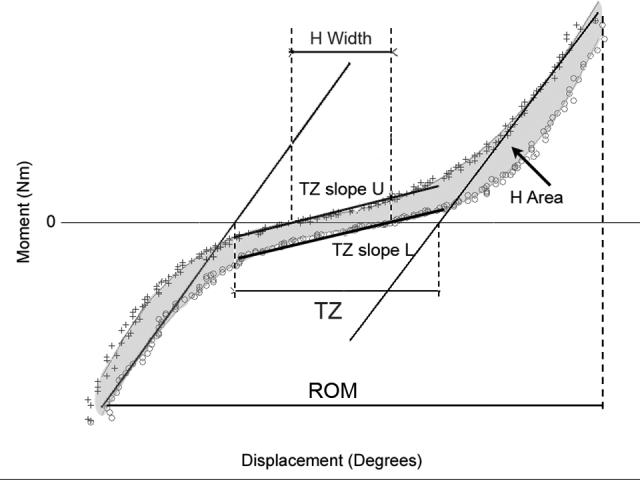
Parameters of dynamic motion derived from the force displacement curves
(TZ = transitional zone, laxity region between the intersection of the toe and first linear region (first and second line) and the intersection of the toe and second linear region (second and third line); TZ slope U = transitional zone slope-upper arm; TZ slope L = transitional zone slope-lower arm; ROM = range of motion; H Width = width of the hysteresis loop at 0 load; H Area = area within hysteresis loop)