
Fig. 2.
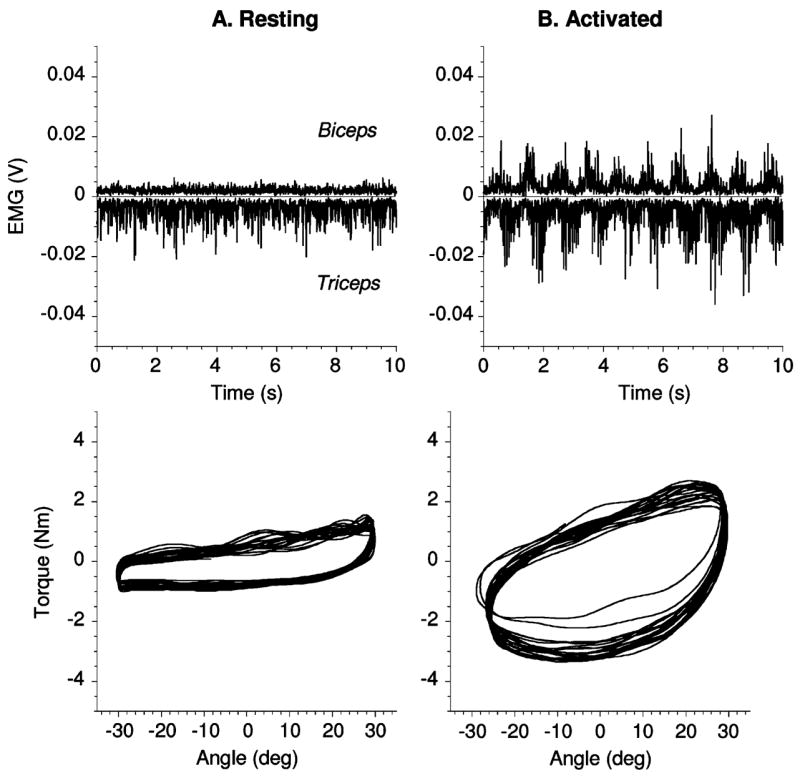
Data for one PD subject off treatment in resting (A) and activated (B) rigidity conditions are shown. Triceps EMG is inverted for better visualization. In torque-angle plots 20 s of data are shown. Estimated inertial torque was subtracted from measured torque in order to better represent resistive torque applied by the subject. Inertial torque was calculated by multiplying estimated moment of inertia of forearm and manipulandum bar 0.2 Kg*m 2 by angular acceleration. Note, this step does not affect W since work calculated for inertial torque over a complete cycle is zero.