
Fig. 7.
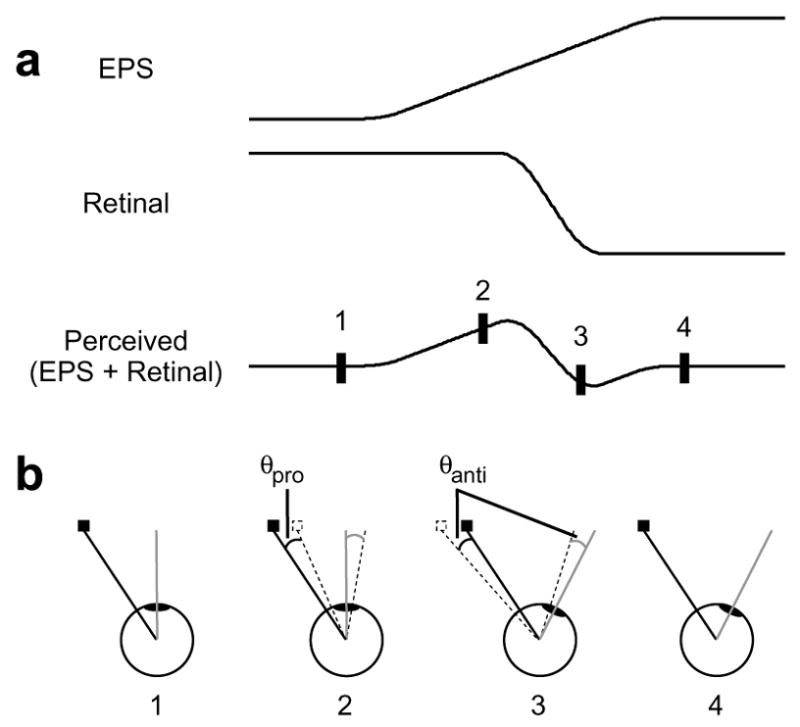
Damped eye position model of mislocalization. (a) Traditional representation. According to the model, the perceived location of a target is calculated by adding together the eye position signal (EPS) and the retinal signal. (b) Modified representation. The eye and the relevant vectors are shown for the four time points denoted in panel a. The true location of the flashed target and its retinal signal are represented by the solid square and the solid black line, respectively, and the subjective location and retinal vector are represented by the dotted silhouette and the dotted black line, respectively. The solid grey line represents the eye’s true bearing, and the dotted grey line is the bearing indicated by a damped eye position signal. Because the retinal signal is always veridical, it will exactly oppose the true bearing. The magnitude and direction of error therefore always correspond to the difference between the true bearing and the eye position signal (θpro) or (θanti).