
Fig. 1.
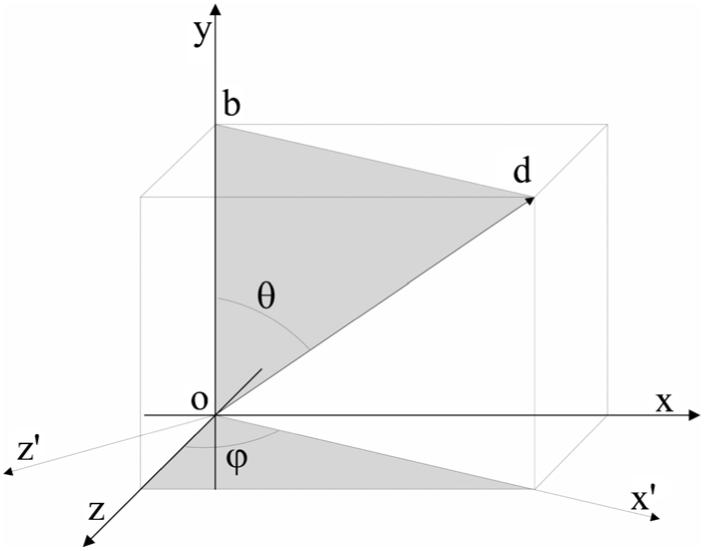
The resultant hip contact force relative to the cup coordinate system. Note that the magnitude and the orientation of the hip contact force may be achieved by two rotationary actuators about y and z′ axes, respectively. z′ is perpendicular to the obd plane. The rotations are represented by angle φ and θ.