
Figure 1.
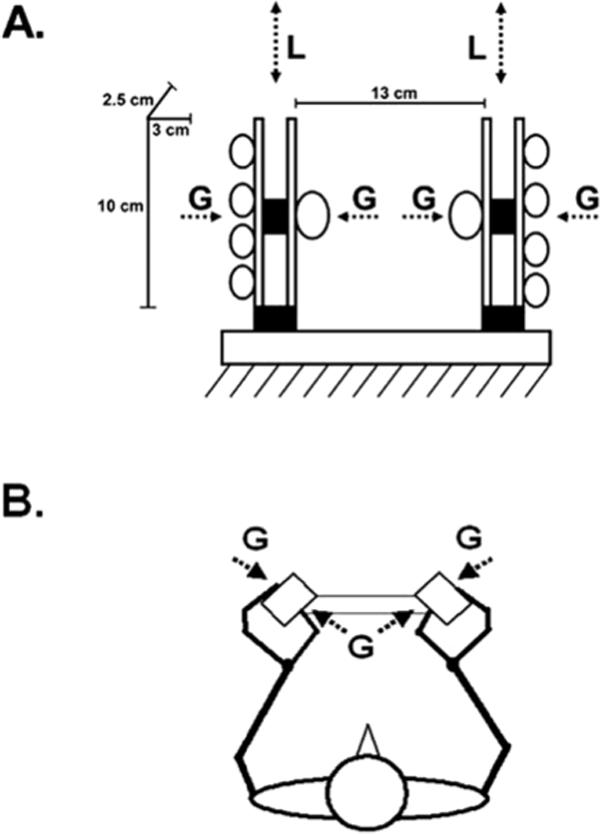
(A) Schematic representation of the experimental device. The circles illustrate the position of the tips of all five digits applying precision grasp against two handles. On the left hand side the dimensions of the opposing grasping surfaces and the distance between them is depicted. The lower shaded rectangles illustrate the force sensors recording the instructed load force (L) exerted in vertical direction, while the upper ones recorded the grip force (G). (B) The stick diagram illustrates the horizontal projection of the body position and hand position, as well as the corresponding G.