
Figure 1.
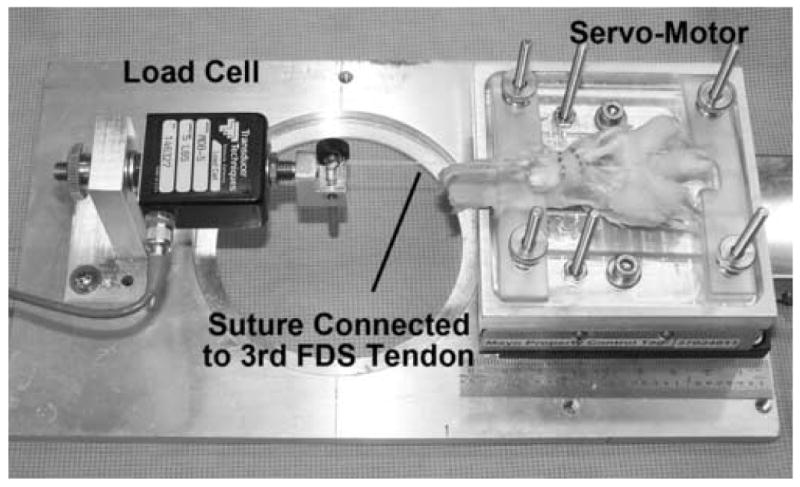
Experimental testing setup. The rabbit paw was clamped to a servo-motor. The third FDS tendon was connected to a fixed load cell. The motor moved the paw distally causing proximal tendon excursion of the third FDS tendon. The second and fourth digits were not allowed to flex.