
Figure 6.
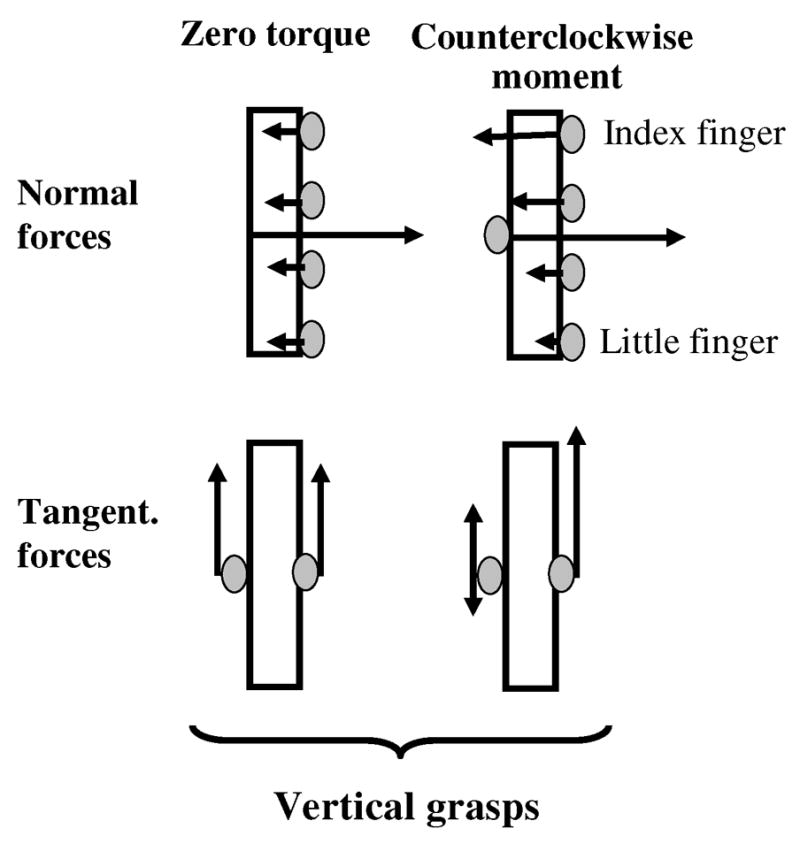
Normal and tangential digit forces during torque production, a schematic. Upper panel - normal forces; bottom panel - tangential forces. In the upper panel, the forces are drawn as vectors with their origin at the digit sensors. In the bottom panel, the tangential digit forces are represented by one vector (the VF force). The moment of the thumb and VF tangential forces is proportional to the difference in the magnitude of the forces. Note that the thumb force can be either in upward or downward direction. During the moment generation in the counterclockwise direction (pronation), the normal forces of index and middle fingers produce moments in pronation, i.e. in the required direction. Such fingers are called torque agonists. The ring and little fingers work in this task as torque antagonists: they generate moments in the opposite direction, clockwise.