
Figure 1.
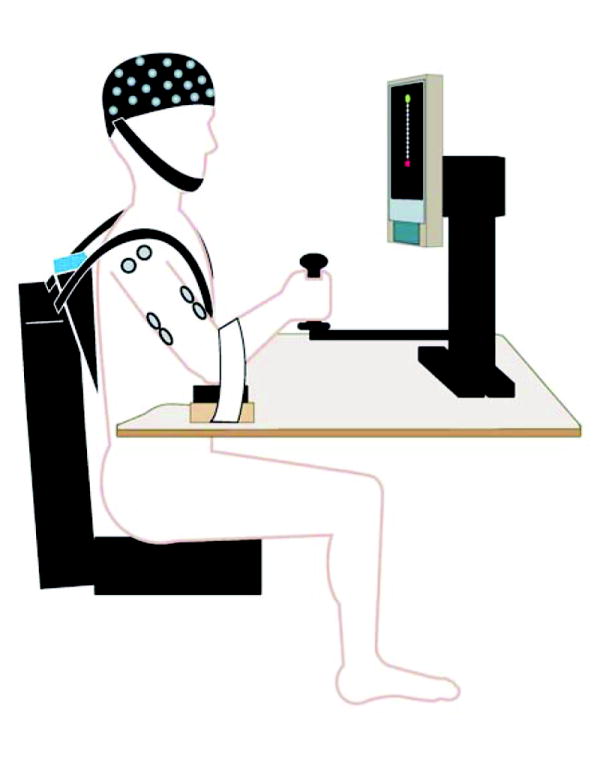
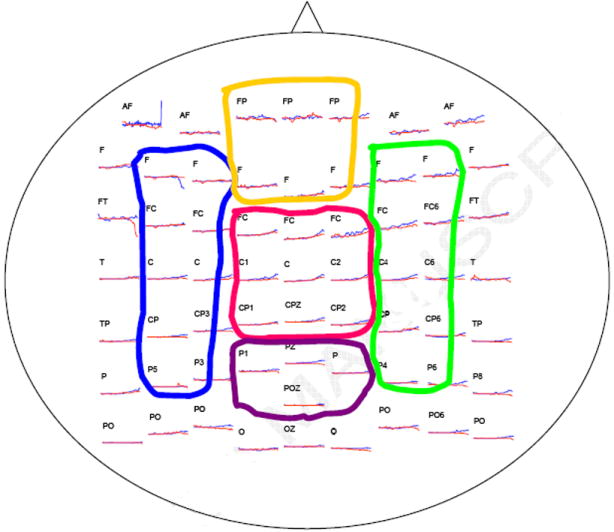
(A) Experimental setup. Subjects were seated on a chair with only the unilateral (affected side) shoulder and arm moveable. The elbow was supported by a piece of smooth wood with little friction with the table. The hand was around a cradle connected to the robotic arm. A target and the start position (current cradle position) were displayed on a screen, and subjects needed to move the cradle forward to reach the target point. No assistance or resistance was provided by the robot through the cradle for the reaching movement. (B) The 10-20 International EEG system and the five areas grouped.