
Fig. 2.
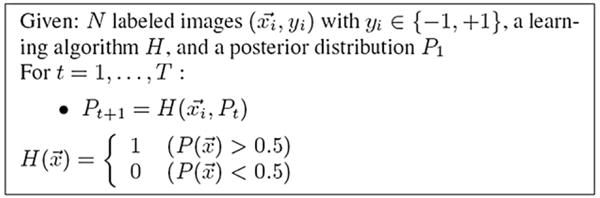
An overview of the auto context model. Here, H() is a cascade of AdaBoosts. Essentially, the labeling at each iteration of AdaBoost is fed back into the learning process as a new feature along with neighborhood-based information calculated on this map, which allows neighboring voxels to influence each other probabilistically. Convergence criteria and more details are presented in our previous work (Morra et al., 2008c).