
Fig. 1.
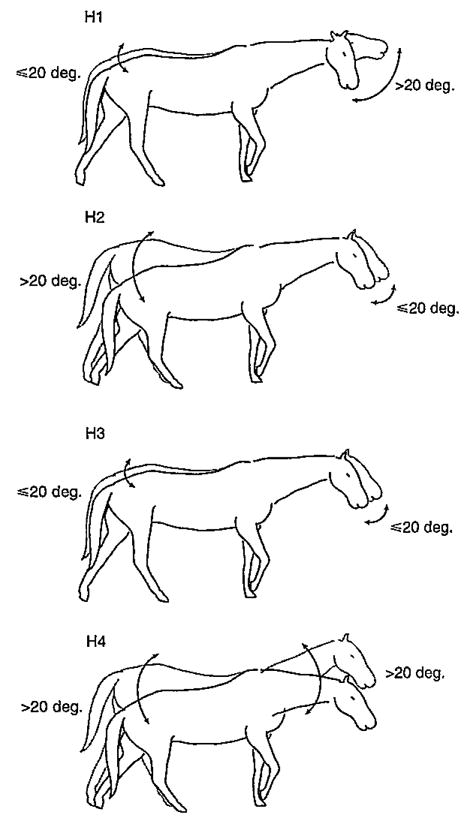
Graphic depictions of Hypotheses 1–4. Although the hypotheses refer to different gaits, a standard walking figure is used for all illustrations in order to emphasize the differences in head, neck and trunk pitch predicted by each hypothesis. Hypothesis 1 (H1); the head is free to rotate more than 20 deg. in the pitch and yaw planes on a stabilized trunk during walks. Hypothesis 2 (H2); the trunk will pitch through more than 20 deg. on a stabilized head during canters. Hypothesis 3 (H3); the head and trunk will remain rotationally stabilized (≤20 deg.) during trots. Hypothesis 4 (H4); the neck will not be rotationally stabilized in the pitch plane because it must make large (>20 deg.) compensatory movements to isolate the head from the rotational influences of the trunk, thereby enabling independent head stabilization relative to space. Arrows indicate the direction and relative magnitude of pitch rotation.