
Figure 2.
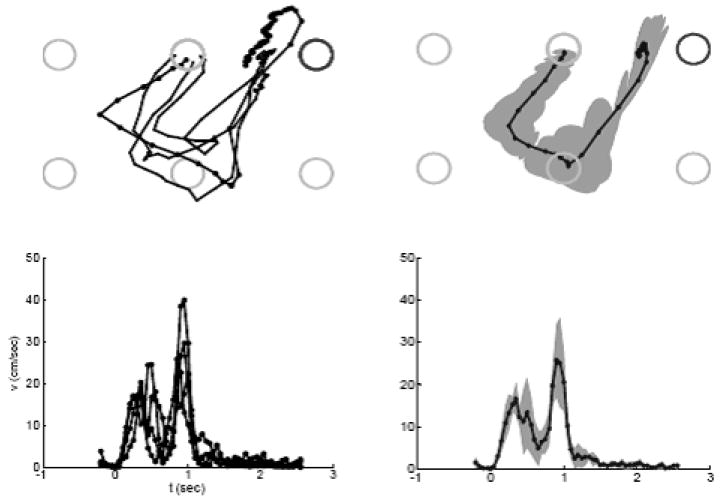
Example trajectories of a subject training in the no-vision (NV) condition. Top: movements of the cursor originating from the top-center target and directed toward the right-center (darker) target are shown individually and averaged. The grey cloud represents a 95% confidence region of cursor location. Bottom: individual and averaged speed profiles of the example movements shown in the top of the figure. Note that the trajectories display a significant curvature. At this early stage of training the subject passed by one of the lower position before heading toward the target. (From Mosier et al. 2005)