
Fig. 2.
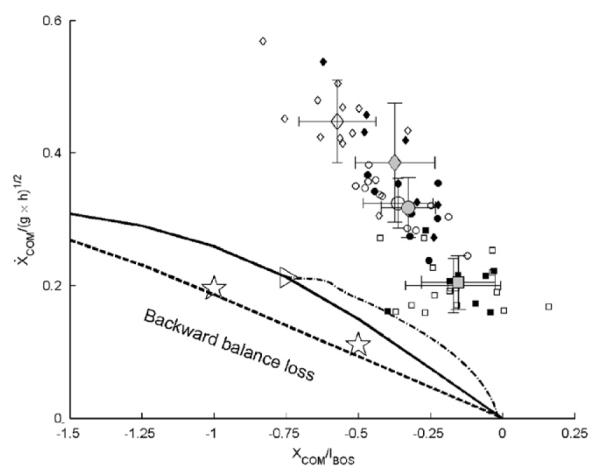
The stability boundary against backward balance loss (solid line) corresponds to initial postures at the beginning of swing phase in regular gait, interpolated based on seven individual initial center of mass (COM) positions (xCOM = 0:0, −0.25, −0.50, −0.75, −1.00, −1.25, and −1.50, normalized to foot length, lBOS, with negative values indicating distance posterior to the base of support (BOS)). All but the condition for xCOM = 0:0 were predicted by the simulation. The velocity of the COM was normalized to , where g is the acceleration due to gravity, and h the body height. To illustrate the actual result from one simulation run, the dash-dot line represents the simulated COM state trajectories for the dynamic optimization solution for walking with an initial COM position of −0.75. The triangle identifies the starting point of the COM state for this single simulation. Also included are the results (two stars) based on the present seven-link model but with two initial postures corresponding to bipedal symmetric standing (xCOM = −0:50 and −1.00), respectively. It is obvious that these states for standing are much closer to the previously published boundary for bipedal standing (dashed line, Pai and Patton, 1997) than to the boundary for walking. Finally, the experimental data from gait analysis are also included. The small open diamond, circle, and square represent the measured COM states at toe-off of the left foot obtained from 39 young subjects walking at fast (n = 12), natural (n =13), and slow (n = 14) speeds. The small closed diamond, circle, and square indicate the COM states of the older subjects (n = 8) at the three walking speeds fast, natural and slow, respectively. The large open and close markers and SD bars, respectively, indicate the corresponding mean ±1 SD values of the COM state for the young and older subjects.