
Fig. 1.
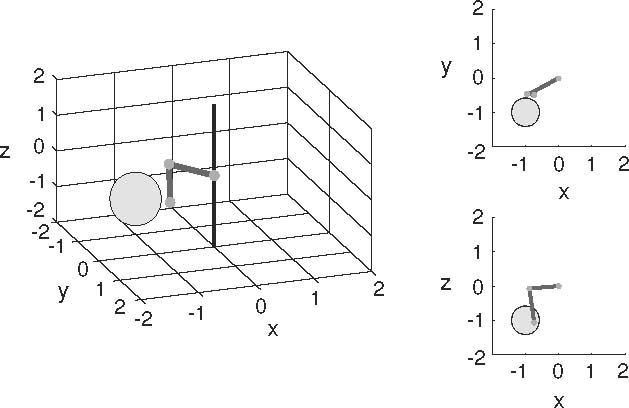
Two-joint arm and an object for reaching in 3D space as well as two projections (x, y) and (x, z) of the arm and the target object for reaching
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
Two-joint arm and an object for reaching in 3D space as well as two projections (x, y) and (x, z) of the arm and the target object for reaching