
Fig. 4.
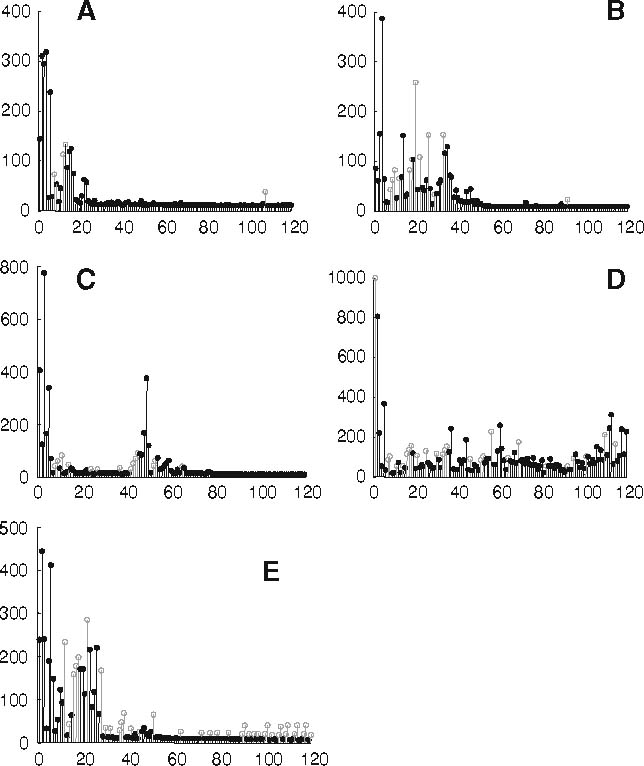
Different example runs. a Quick convergence to a good trajectory within about 22 trials. b Delayed convergence (≈50 trials). c Quick convergence in less than 20 trials and thereafter some divergence and re-convergence to a different trajectory. Note from a practical perspective the robot would just stop learning after about trial 20 and the second phase is not of relevance. d Badly convergent case. e Good convergence but with interspersed other, longer trajectories (light shading). Also here the robot would normally stop learning after having found the better trajectory and ignore the others