
Figure 2.
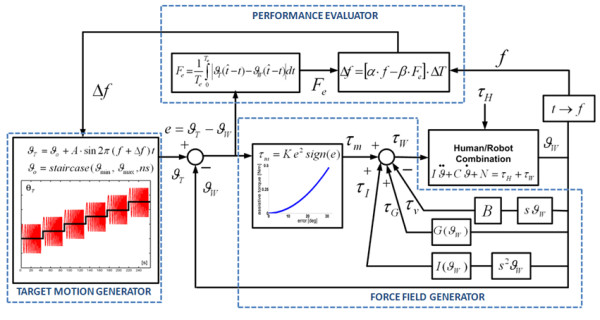
Controller diagram. The "assist-as-needed" force parabolic term continuously inputs torque τm when errors are present during the tracking task. The input torque to the robot/hand system is the sum of different contributions of a viscous field τv, a gravity τG and inertia τI compensation. τH is the torque applied by the subjects wrist.