
Figure 2.
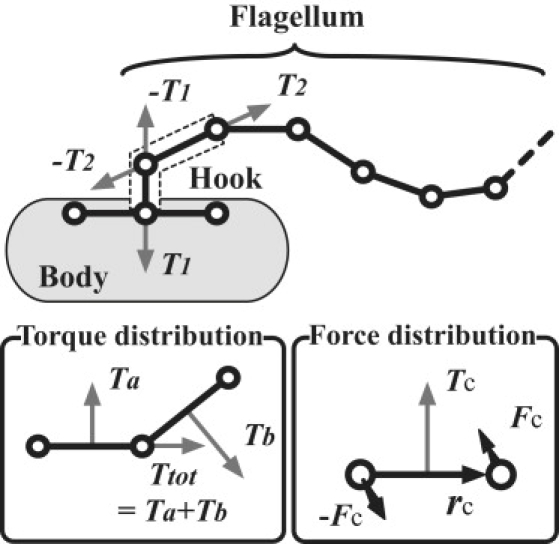
(Top) The model of a hook and the distribution of the torques from the action of a rotary motor. (Bottom left) The decomposition of a torque Ttot into two torques Ta and Tb, each of which is perpendicular to a spring. (Bottom right) The decomposition of a torque Tc into a force couple Fc and –Fc, with which Tc = rc × Fc is satisfied.