
Figure 2. Functioning of the instrumented cylinder.
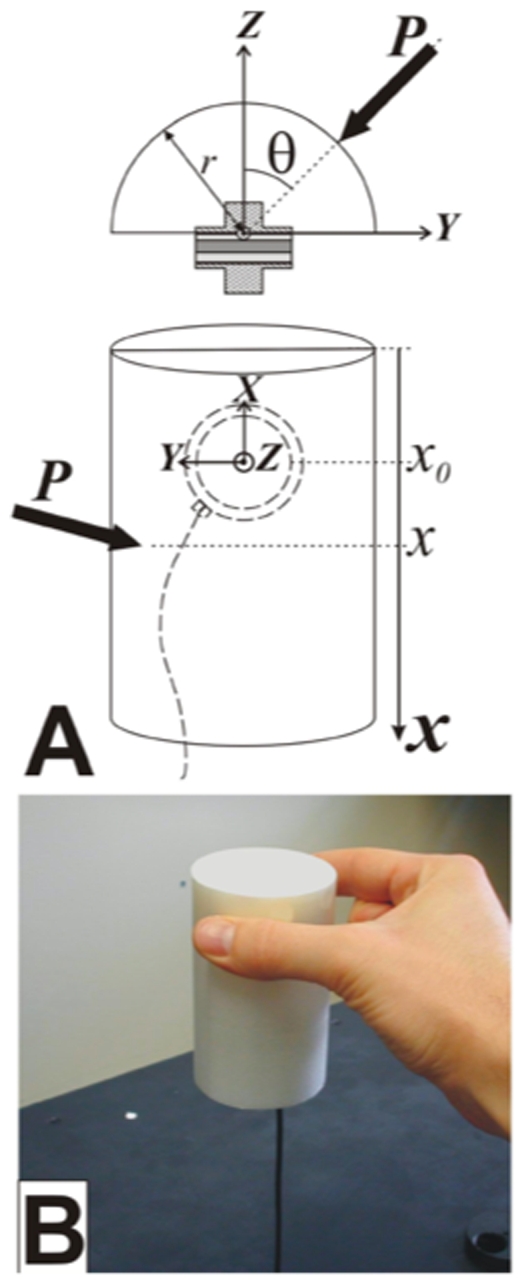
A. The apparatus is designed to measure the orientation (θ) and vertical location (x) of the applied force (P) by either the index or thumb while exerting a grip force. These parameters are computed from outputs of a F/T sensor (with axes X, Y and Z) embedded in the two half-cylinders using two T-adaptors. B. The participants were asked to lift the cylinder with the thumb and index fingers of the right hand and hold it at about 5 cm above the table.