
Fig. 2.
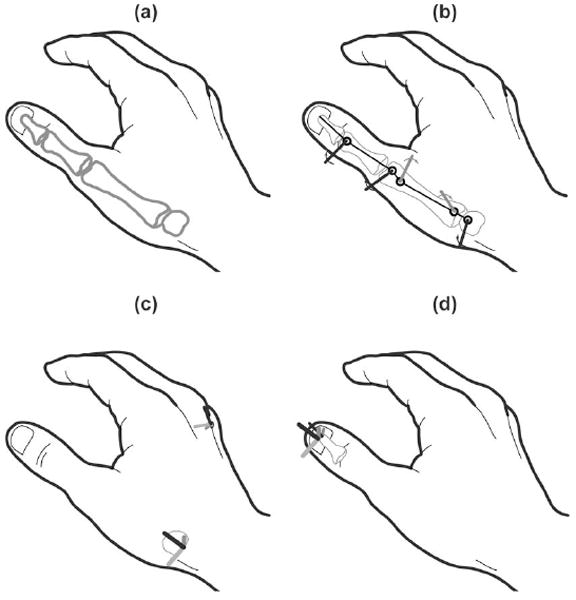
(a) Model structure consists of 36 independent model parameters: 8 bone dimensions [30], (b) 16 axes of rotation parameters [27]–[29], and (c), (d) 12 coordinate transformation parameters [31]. One transformation relates the proximal end of the thumb at the base of the trapezium to a space-fixed coordinate system on the back of the hand, while the other relates the distal end of the thumb at the tip of the distal phalanx to a body-fixed coordinate system on the thumbnail.