
Figure 2.
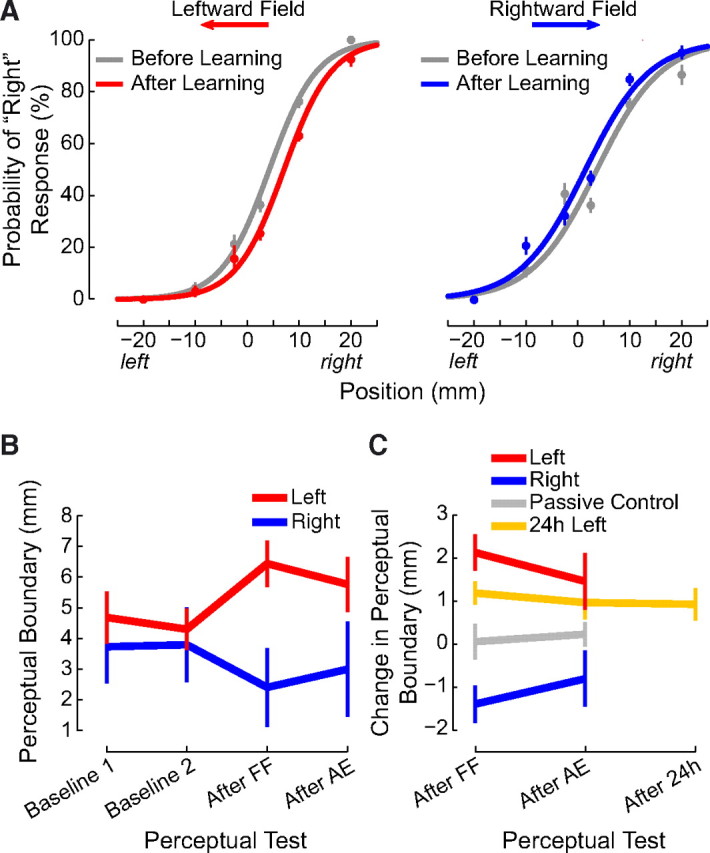
Following motor learning, the perceptual boundary shifts in a direction opposite to the applied force. A, Binned response probabilities averaged over subjects (±SE) before (gray) and after (red or blue) learning and fitted psychometric functions reflecting perceptual classification for each force-field direction. B, Mean estimates of the perceptual boundary between left and right (±SE) are shown for baseline estimates (Baseline 1 and Baseline 2) and for estimates obtained following force-field learning (After FF) and following aftereffect trials (After AE). The sensed position of the limb changes following learning, and the change persists following aftereffect trials. C, The perceptual shift depends on the direction of the force field (left vs right). The change in the perceptual boundary persists for at least 24 h (24 h Left). A perceptual shift is not observed when the robot passively moves the hand through the same sequence of positions and velocities as in the left condition such that subjects do not experience motor learning (Passive Control).