
Figure 3.
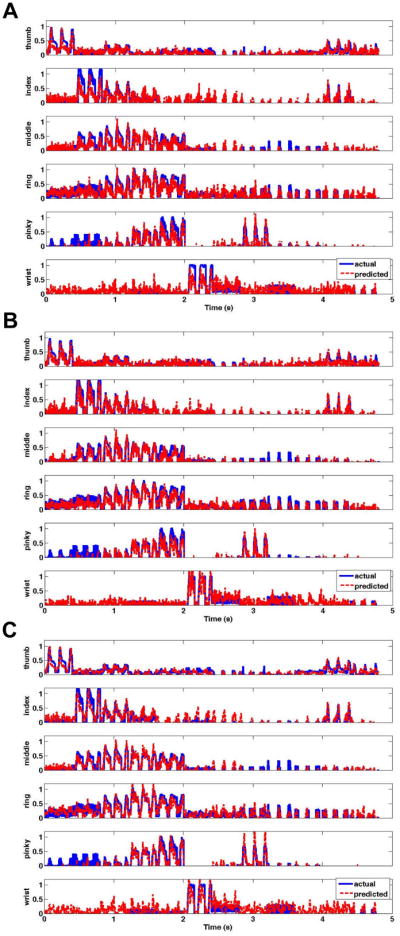
Reconstruction for the position of each end-effector using a) linear model, b) feedforward ANN, and c) Kalman filter. The predicted kinematic output (red) for each digit and the wrist was highly correlated with the actual hand kinematics (blue) using all three decoding models. Results are shown for monkey K (n = 115).