
Figure 2.
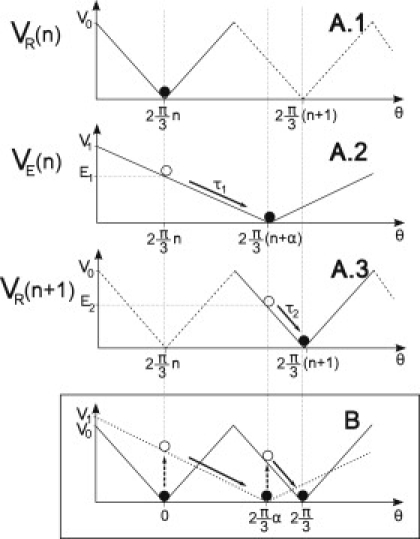
Dynamics of the two-states flashing ratchet model. (A1, A2, and A3) Detailed dynamics along the complete nth step. The step involves two flashes of the potential that perform two different strokes. The nth step starts when the motor switches the relaxed state potential VR(θ, n) (A1) to the excited state potential VE(θ, n) (A2) so VE(θ, n) produces a torque τ1 that moves the shaft to the minimum of VE(n), therefore performing the first substep. The length of the first substep is determined by the parameter α (0.5 < α < 1). After this substep, the motor switches the potential from VE(θ, n) (A2) to VR(θ, n + 1) (A3) so VR(θ, n + 1) produces a torque τ2 that moves the shaft to the minimum of VR(θ, n + 1), completing the second substep. The step is then finished and the shaft rests in the next minimum until a new excitation. In the scheme, the shaft is represented by a solid circle in the steady states and by an open circle in the transient ones. Solid lines show the potential acting on the γ-shaft in the corresponding state, and dashed lines indicate the periodicity of VR. (B) Merger of panels A1, A2, and A3 for a compact visualization of the whole step including the relaxed (solid line) and the excited (dotted line) potentials. Initial minimum is chosen at θ = 0, allowing us to compare angular distances. Along the step, this is equivalent to chose n = 0. Dashed arrows indicate potential switching.