
Figure 8.
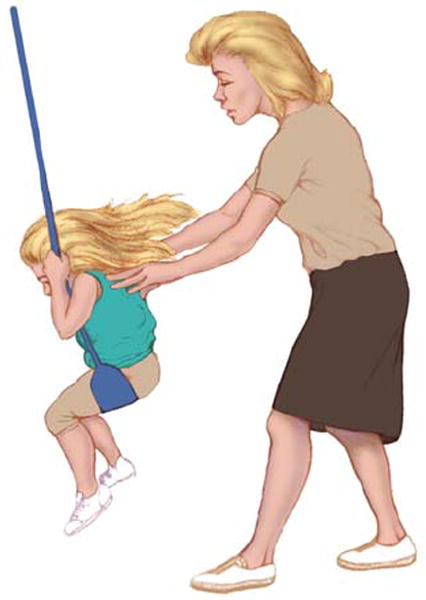
A playground swing is a simple example of mechanical frequency selectivity with a passive system. The swing moves back and forth at a frequency that is determined by the length of the rope and the mass of the child. The parent can make the swing move at a different frequency by exerting considerably more effort than pushing at the natural frequency.