
Figure 3.
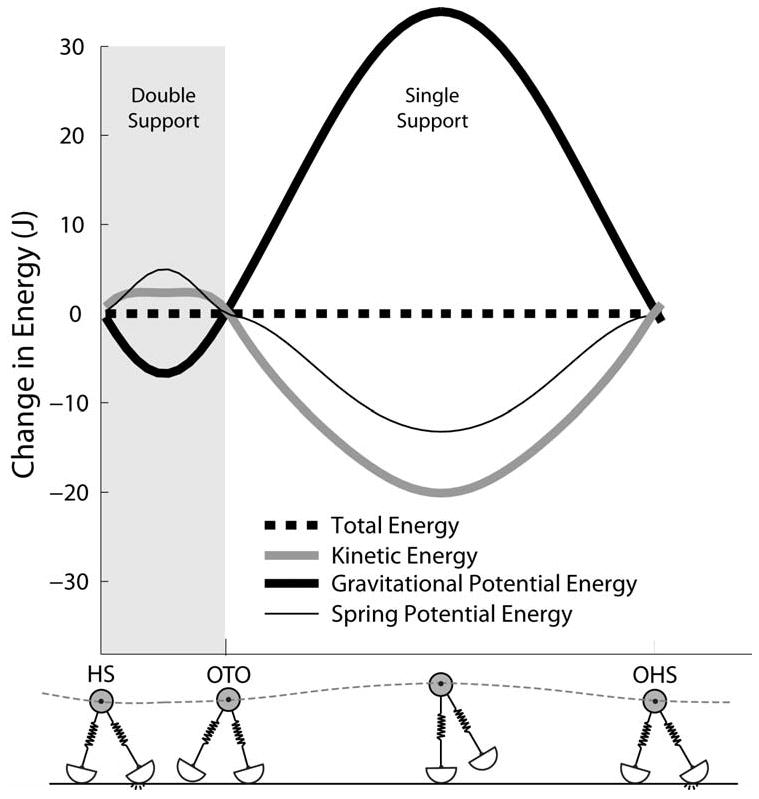
The simple mass-spring model of walking is conservative, such that there was no change in total energy across a half gait cycle. The increase in gravitational potential energy during the first half of single support occurs as a result of both limb spring lengthening (decrease in spring potential energy) and a reduction in forward velocity (decrease in kinetic energy). A 0.3 m radius roller was used to generate this 1.35 m/s walking speed simulation. Abbreviations: HS – heel strike, OTO – opposite toe-off, OHS – opposite heel strike