
Figure 8.
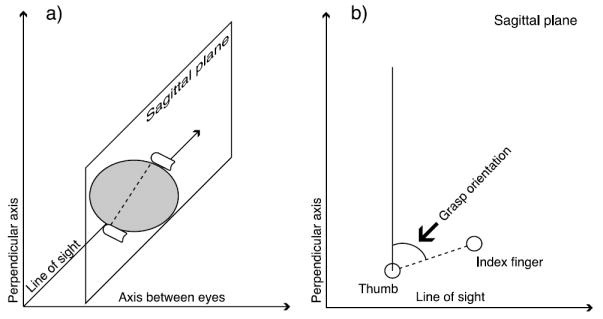
Calculation of grasp orientation. (a) The thumbs grasping the coin and the vector between the contact points, which is projected into the sagittal plane. (b) A view of the sagittal plane from the subject’s right and the grasp orientation angle specified by the projected vector.