
Figure 4.
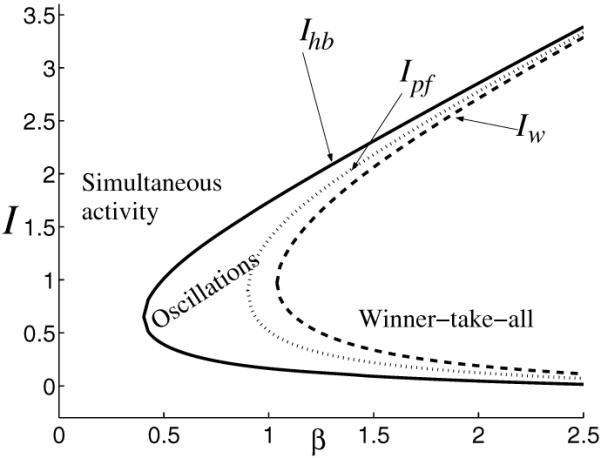
Dynamical regimes in system (2.1) as inhibition strength β and stimulus strength I vary (other parameters are fixed: g = 0.5, τ = 100, r = 10, θ = 0.2). To the left of curve Ihb (solid line) the system has a unique stable equilibrium, and this satisfies u1 = u2 (simultaneous activity); in the region between curves Ihb and Iw (dashed line) the system oscillates; then to the right of Iw the system has a winner-take-all behavior (two stable and one unstable equilibria). The curve Ipf (dotted line) indicates a transition from one equilibrium to multiple equilibria in (2.1). While the attractor’s type (limit cycle) does not change between Ihb and Iw, the number of equilibria does: we find one unstable equilibrium between Ihb, Ipf and three unstable equilibria between Ipf, Iw. The turning points of curves Ihb, Ipf, and Iw are obtained at , β = g+1/S’(θ) = 0.9, and βwta = 1.0387, respectively.