
Figure 1.
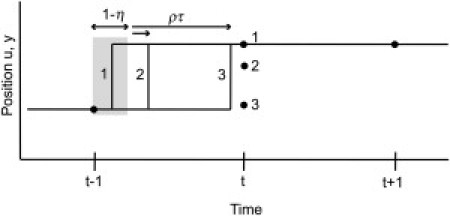
Integrating-detector model; three realizations of a step occurring between t and t+1 result in three different observed positions yt (solid circles). If the step occurs during the deadtime (instance 1; corresponds to ρ = 0 in Eq. 1) the observed position at time t will reflect the full size of the step. Steps occurring after the deadtime (instances 2 and 3) result in smaller observed position changes, according to the variable τ in Eq. 1).