
Figure 2.
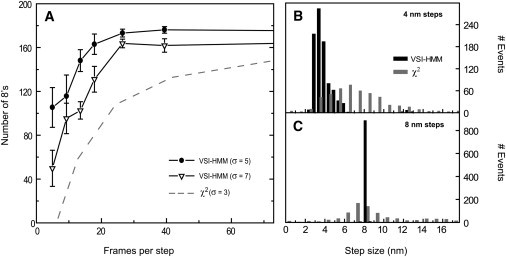
Comparison of the performance of the VSI-HMM-Viterbi algorithm with the χ2 detector of Kerssemakers et al. (6). (A) Motor time courses, each containing 200 steps of size 8 nm with mean dwells of 24 points, were generated using the continuous-time simulator. From the HMM-Viterbi restorations the Number of 8's metric of Carter et al. (1) was evaluated and plotted. This metric counts the number of detected steps that occur at the correct time (±2 sample intervals) and have the correct size (8 ± 3 nm); error bars indicate the standard deviations from 10 trials at each mean step duration. The performance with root mean square noise levels of 5 and 7 nm (circles and triangles) was superior to that from the filtered χ2 detector even at the lower noise level of 3 nm (dashed line, data from Fig. 6 of (1)). MAP estimation with ɛ = 0.001 was employed, although indistinguishable results were obtained with ɛ = 1, that is with essentially no effect from the MAP prior probability. (B) Steps recovered by VSI-HMM-Viterbi from 18 simulations, each with σ = 6 nm and comprised of 50 steps of size 4 nm. Even at the large noise level, the small steps are detected with high accuracy: mean = 3.6 nm, standard deviation = 2 nm. The χ2 detector finds a broader distribution of step sizes that extends beyond 8 nm. (C) Same as in panel B but with all simulated steps 8 nm in size. The steps were detected with almost no error. In comparison, the χ2 method found a broad range of step sizes. In panels B and C, the simulation assumed a mean velocity of 300 nm/s and a frame rate of 2000 s–1; MAP estimation was employed, with ɛ = 0.005, and the detector data are from Fig. 8c and 8d of Carter et al. (1).