
Figure 2.
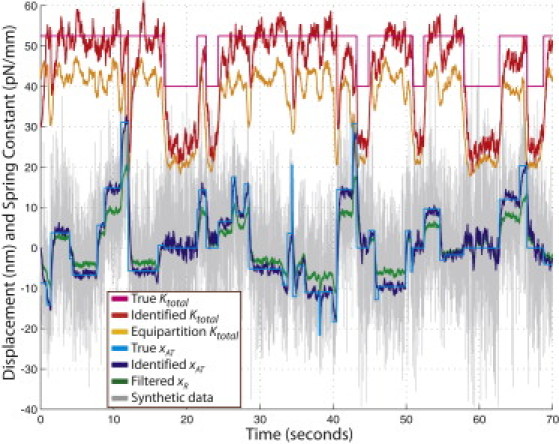
Validation of the Kalman filters in simulations. The time series of true motor head displacements was used in the two-bead model to produce synthetic measurements, y, of the right bead position (shown in gray). Ktotal, identified by the single-bead Kalman filter, is shown in red. Orange line shows Ktotal identified using Eq. 12. The identified xAT and the filtered xR (green line) were obtained using the two-bead Kalman filter (Filter 1 in Fig. S1).