
Fig. 3.
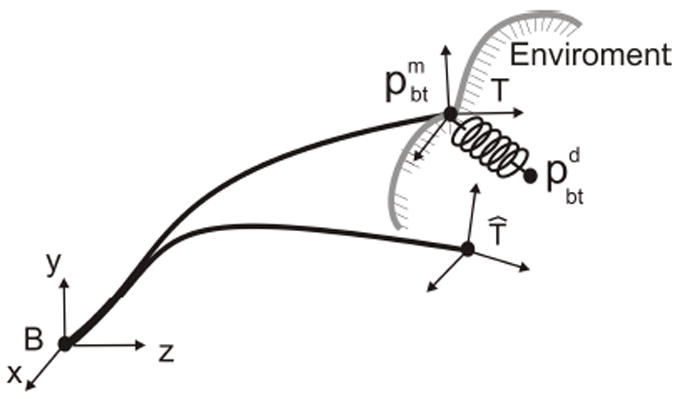
Controller implements a virtual linear spring at the tip of the manipulator. Desired actuator positions are such that when robot is deflected from unloaded tip configuration, T̂, to configuration T, the desired tip spring force is generated and the desired tip orientation is achieved.