
Figure 1.
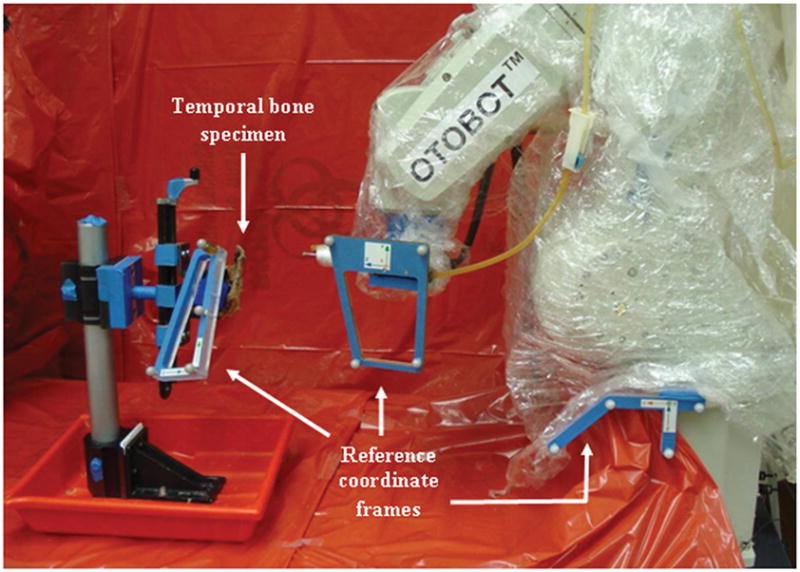
OTOBOT™ robotic system set up to perform mastoidectomy on patient (temporal bone specimen in this current study). The robotic system consists of a Mitsubishi RV-3S industrial robot controlled by custom software. Coordinate reference frames with markers are attached rigidly to the robot end effector, robot base, and patient to allow tracking of the movements of the robot, drill, and patient during milling. An NDI Polaris optical tracking system (not shown here) is used to track the markers.