
Fig. 4.
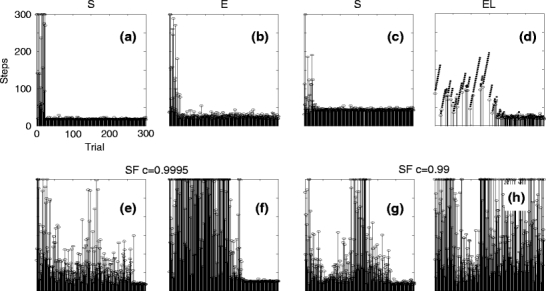
Patterns of convergence for different path generation and learning strategies as given above each panel (S, E, EL, SF). (a, b) show situations where an optimal and (c) where a non-optimal (zigzagging) path has been learned. The small dots in panel (d) indicate trials where the rat had not found the reward within its limited learning horizon (strategy EL). Finally the optimal path has been found here, too. Panels (e–h) show different cases that can happen when using the SF-strategy. In (e) a very late convergence to the optimal path is seen. In (f) late convergence to a non-optimal path occurred. In (g) the system was intermediately divergent and finally found the optimal path, while in (h) the system seemed to converge, but then finally diverged. Default parameters (Table 1) were used in all cases