
Fig. 7.
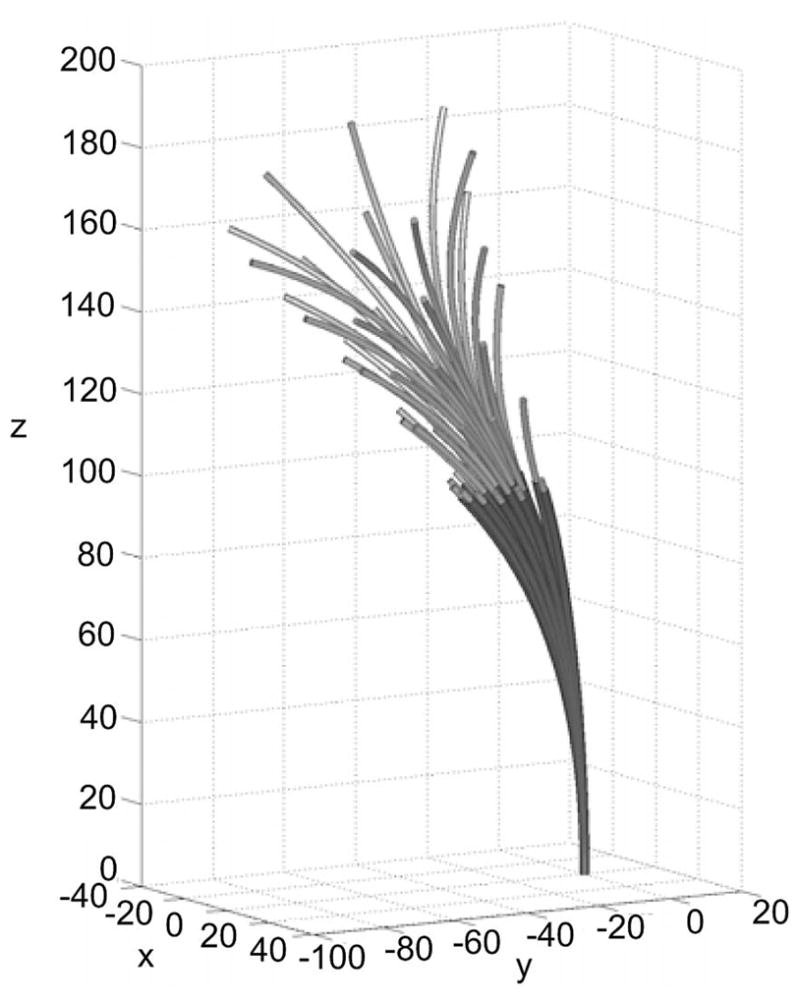
Cannula in all 40 experimental configurations. One can span the entire workspace by rigidly rotating this collection about the z-axis, which can be accomplished by rotating the base of each tube by the same amount while keeping their angular differences the same. Thus, the above illustrates a sampling of all unique configuration space locations from the model’s point of view. For each configuration, backbone data were collected in the unloaded state and with a force applied to the tip of the cannula.