
Fig. 2.
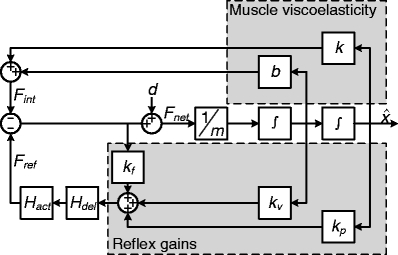
Lumped reflex gain model used to fit reflex gains onto the output of the perturbation experiments of the neuromusculoskeletal model. In this lumped model, the force disturbance d is applied to a single inertia m. Muscle viscoelasticity is represented by a stiffness k and viscosity b. Reflexive feedback is represented by a positional feedback gain k
p, a velocity feedback gain k
v and a force feedback gain k
f. A single reflexive feedback neural time delay τ
del is represented by H
del. The first order muscle activation dynamics are H
act. Output of this lumped model is joint position 