
Fig. 6.
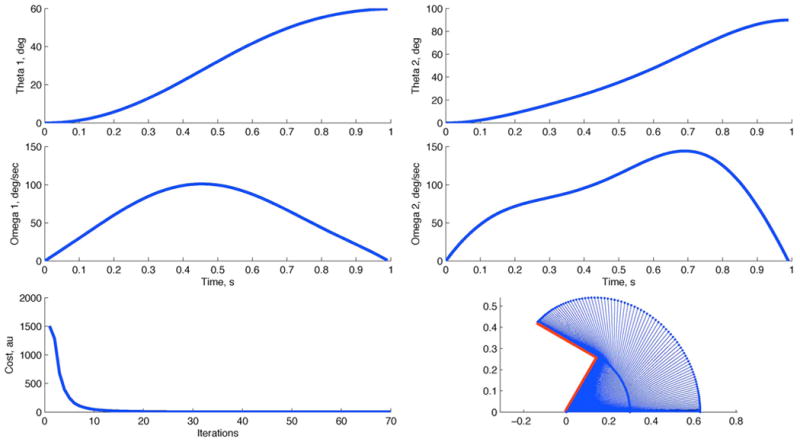
Simulation results for our two-link arm model using an optimal feedback controller. The task is to move the two-link arm from the initial configuration of (θ1, θ2) = (0, 0) to (θ1, θ2) = (60°, 90°) in the time horizon of 1 s and with 0 terminal velocity (ω1(T), ω2(T)) = (0, 0)). The lower left panel illustrates the reduction of the cost function for every iteration of the ILQG algorithm. The algorithm convergences quickly (after about 15 iterations), and yields smooth joint-space trajectories with close to bell-shaped velocity profiles.