
Figure 5.
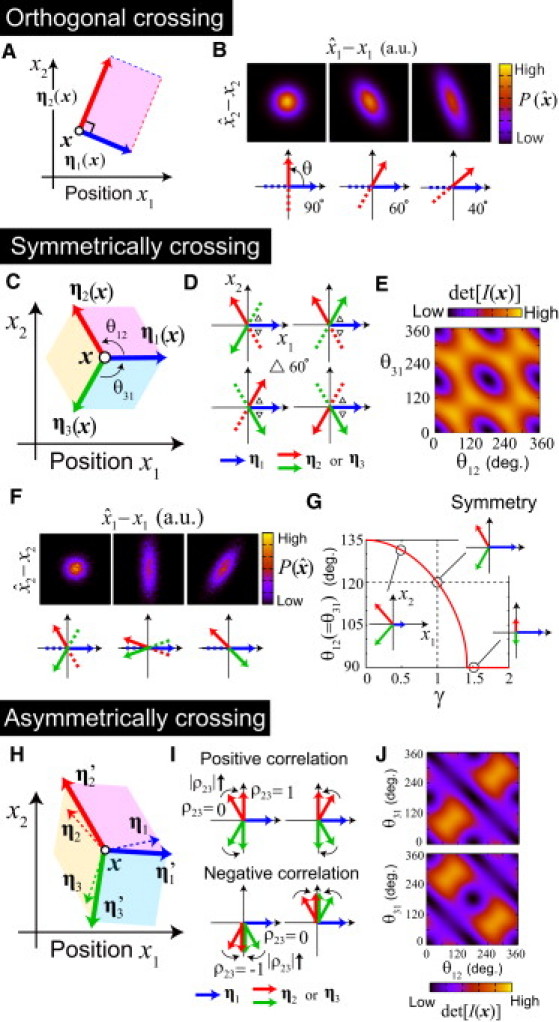
Optimal encoding designs for two-dimensional positioning. (A and B) Orthogonal morphogen gradient vectors is the optimal encoding in the absence of informational redundancy (M = N). In this case, ML decoding () becomes the natural decoding (u−1 (x)). Distribution of was calculated for the case with grad u1 (x) = (1,0), grad u2 (x) = (cos θ, sin θ), σ1 (x) = σ2 (x), and ρ12 (x) = 0 at a focal location x. is the sharpest for the orthogonal crossing. (C–J) Encoding designs in the presence of informational redundancy (M > N). When different morphogens have the same PP and their noises are independent, (C) symmetrically crossing gradient vectors gives the best encoding. (D) Eight possible encoding rules to achieve maximal precision, and (E) dependence of the precision and (F) that of on the angles between gradient vectors in the case of (N,M) = (2,3). (E) The value det[I(x)] was calculated for the case with η1 = (1,0), η2 = (cos θ12, sin θ12), and η3 = (cos (−θ31), sin (−θ31)). (F) is shown for the cases with (θ12,θ31) = (120°, 120°) (left), (θ12,θ31) = (160°, 160°) (middle), and (θ12,θ31) = (135°, 45°) (right). When different morphogens have different PP or when their noises are correlated, (H) the best encoding is no longer the symmetrical arrangement. (G) In the case of ‖η1‖ = γ ‖η2‖ = γ ‖η3‖ and ρ12 = ρ23 = ρ31 = 0, for γ >> 1, the maximum precision is achieved when the angle between the gradient vectors of morphogens 1 and 2 (or 3) is 90°; for γ << 1, the best encoding is when the angle of gradient vectors of morphogens 2 and 3 approaches 90°. The relative orientations of gradient vectors are shown for the cases of γ = 0.5, 1.0, 1.5. (I) When ‖η1‖ = ‖η2‖ = ‖η3‖, ρ12 = ρ31 = 0, and ρ23 ≠ 0, the optimal angle between the gradient vectors of morphogens with uncorrelated noises approaches 90° as |ρ23| increases. (J) Dependence of the precision on the angles in the case of ρ23 = ±0.8. In the calculation of det[I(x)], we assume η1 = (1,0), η2 = (cos θ12, sin θ12), and η3 = (cos(−θ31), sin(−θ31)).