
Fig. 2.
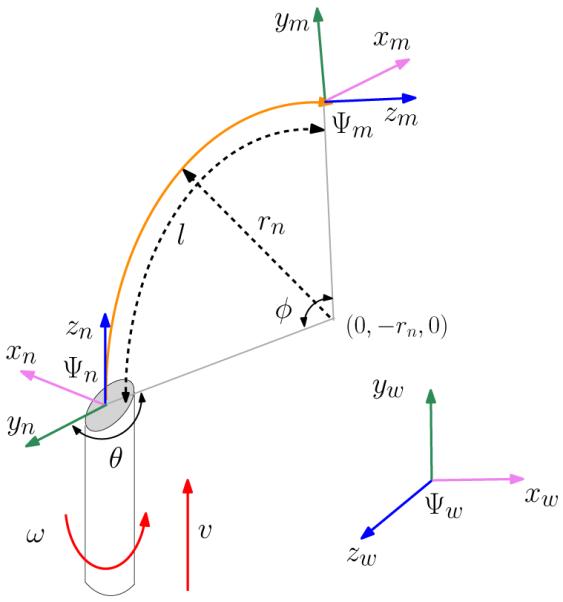
Needle kinematic model in world reference frame ψw. A body coordinate frame ψn is rigidly attached to needle tip. The axes are aligned such that the z-axis is the direction of forward motion, and the bevel tip causes the needle to rotate instantaneously around the line parallel to the x-axis and passing through the point (0, −rn, 0). The needle path (shown in orange) is parameterized as a triplet (l, rn, θ).