
Fig. 3.
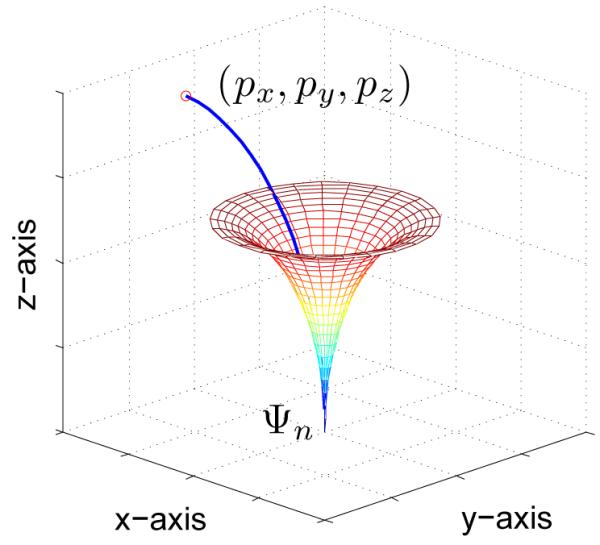
The reachable set for the steerable needle in the local coordinate frame of the needle-tip ψn is constrained to be inside the volume of the region defined locally by Eq. 4 (shown by the colored mesh). Point p = (px, py, pz) can be reached by the needle tip.