
Fig. 5.
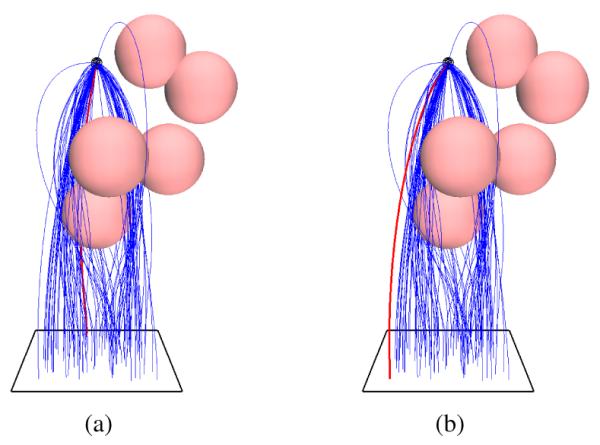
Test Case 1: Spherical Obstacles. The rectangular entry region is shown as a black rectangle at the base of the environment. (a) Optimal needle trajectory that minimizes the needle insertion depth (αl = 1, αo = 0). (b) Optimal needle trajectory that maximizes the clearance from the obstacles (αl = 0, αo = 1).