
Fig. 7.
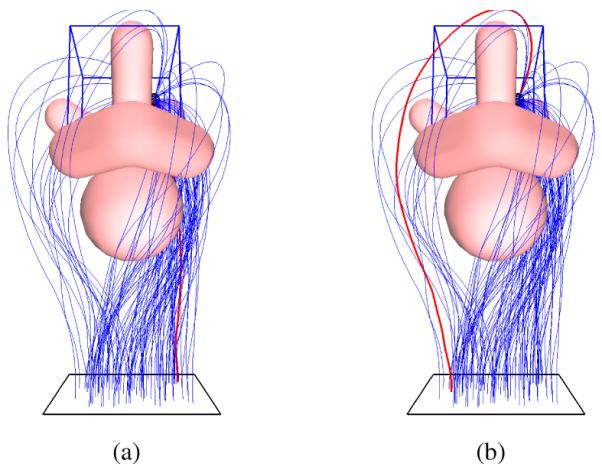
Test Case 3: Prostate Anatomy. To simulate the environment encountered by physicians performing prostate brachytherapy cancer treatment, we use a model of anatomical obstacles including the urethra, penile bulb, pubic bone, and seminal vesicles around the prostate (labeled in Fig. 1) as in Xu et al. [22]. (a) Optimal needle trajectory (shown in red) that minimizes needle insertion depth (αl = 1, αo = 0). (b) Optimal needle trajectory that maximizes the clearance from the obstacles (αl = 0, αo = 1).