
Figure 2.
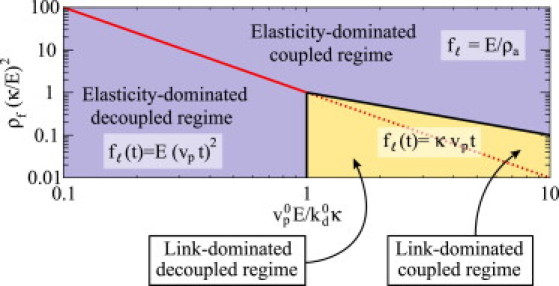
Dynamical regimes and associated filament-link force . The dynamical regimes of the system are shown in their most restrictive form (see text for details). Coupled () and decoupled () regimes are separated by the red line (continuous and dotted), which corresponds to . In the decoupled regime, the link force is dominated by either the filament-link deformation (; the link-dominated decoupled regime) or the network elasticity (; the elasticity-dominated decoupled regime), in which case and , respectively. Similarly, in the coupled regime, the link force is dominated by the filament-link deformation (; the link-dominated coupled regime) or the network elasticity (; the elasticity-dominated coupled regime), in which case and , respectively. The yellow and blue regions correspond to the parameter space where the resistive force is dominated by the link and network deformations, respectively. (In color online.)