
Fig.4.
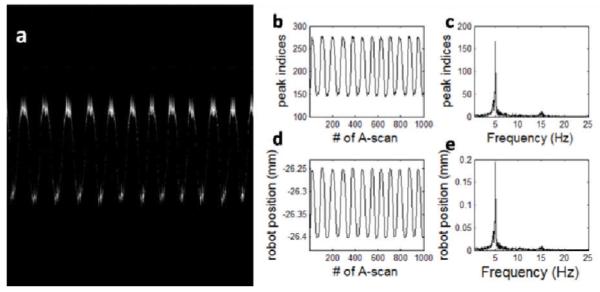
(a) M-scan obtained when we imaged a mirror in water using sinusoidal modulated robot motion; (b) time varying peak position of OCT A-scans; (c) result of Fourier analysis of Fig.4(b); (d) commanded Robot motion; (e) result of Fourier analysis of Fig.4(d).