
Figure 1.
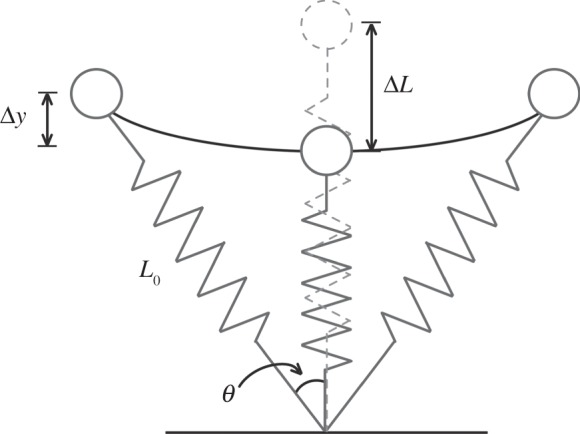
A schematic of a simple spring–mass model used to characterize the overall biomechanics of bouncing gaits such as running and sprinting. This model represents the body's mass as a point mass and the leg as a massless linear spring. At the initial point of ground contact, the leg spring is uncompressed and equals a length denoted by L0. During the stance phase, the leg spring is compressed, and reaches maximal leg compression (ΔL) at approximately mid-stance. The CoM is displaced vertically (Δy), and horizontally, where one-half the angle swept by the leg spring during ground contact is denoted as θ.