
Figure 1. Planning and reaching with obstacles present.
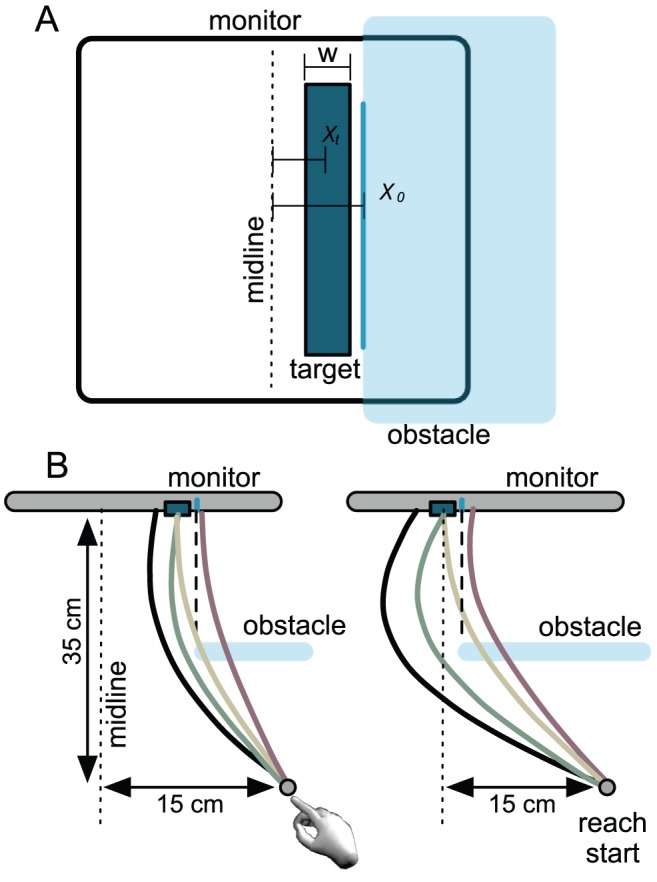
The subject attempts to touch a target on a computer screen while avoiding an invisible obstacle placed partway along the trajectory of movement that the subject would take if the obstacle were not present (shown as a transparent blue plane in these figures). A. From the subject's viewpoint. B. Two examples, seen from above, with possible trajectories marked. Both target and obstacle are elongated vertically so that only the horizontal x-coordinates of possible movement trajectories (shown as colored traces connecting start position and monitor screen) affect the resulting rewards and costs. The obstacle edge was separated from the target by 6.6 mm in all conditions (i.e.,  mm).
mm).