
Figure 10.
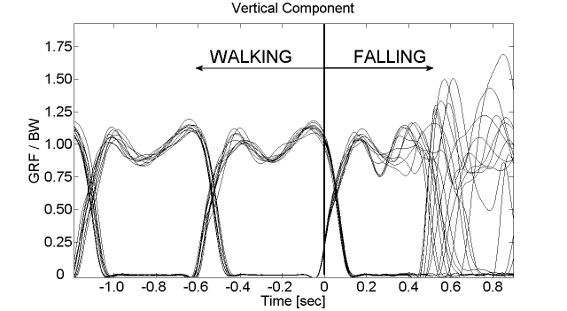
Vertical component of the GRF during pilot tests. GRF vertical components normalized to body weight while a subject underwent ten different perturbations occurring during the early stance phase. Walking speed was 1.11 m/s. In order to show the robustness of the algorithm triggering a specific event, all variables are aligned with respect to the trigger (Time = 0).