
Fig. 2.
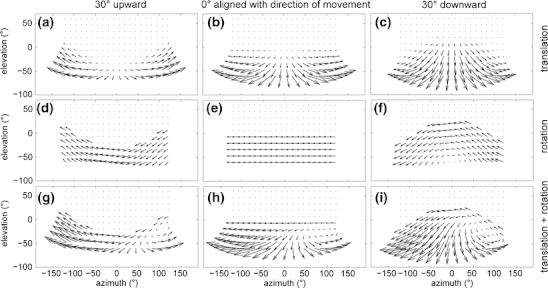
Visual motion fields for a spherical camera model for varying tilt and self-motion defined as a linear speed of v z = 2 cm/s and/or a rotational velocity of ω y = 15 °/s. (a-c) Shows motion fields generated by the forward motion, in (a) for γ = -30 °, (b) for γ = 0 °, and (c) for γ = 30 °. (d-f) Shows motion fields generated by a rotation along an axis orthogonal to the ground. Roll is very dominant in the motion field of (f), which is a result of the camera pointing downward while rotating around an axis orthogonal to the ground that is not the vertical axis of the camera. (g-i) Depict motion fields that are the result of adding motion fields from the first and second row. These are examples of motion fields generated by curvilinear motion. The vanishing point in (i) that appears around 90 ° azimuth and -20 ° elevation does not denote the theoretical focus of expansion. Instead it shows the center of motion that is the focus of expansion shifted by the rotational visual motion component. In all plots, the x-axis to y-axis has an aspect ratio of 1:2