
Figure 7.
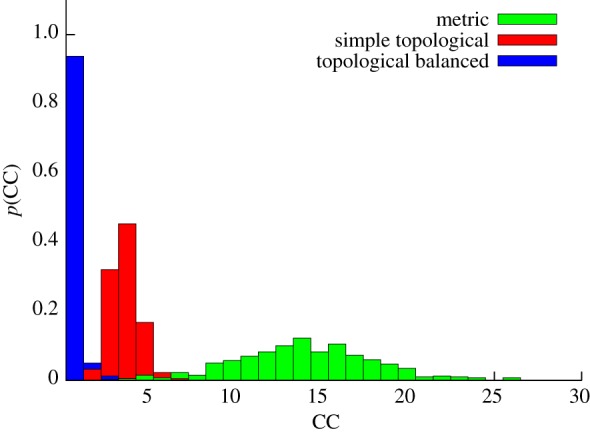
Stability against external perturbation. Probability that a flock splits into M CCs after a perturbation. An obstacle is placed in the direction of motion of the flock (in axis with its centre of mass) approximately at a distance of twice the flock radius. The obstacle is modelled as a sphere of radius 2. When a bird's distance from the obstacle is smaller than the sphere radius, it takes the opposite direction with respect to the obstacle, regardless of its neighbours. For all three models observables are polarization, Φ = 0.99; number of connected components,  Parameters are the following. Metric model: α = 35, β = 0.5, η = 0.25, rc = 0.65 (implying
Parameters are the following. Metric model: α = 35, β = 0.5, η = 0.25, rc = 0.65 (implying  ). Purely topological model: α = 35, β = 0.25, η = 0.25, nc = 20. Topologically balanced model: α = 35, β = 0.06, η = 0.125, μ = 0.7 (implying
). Purely topological model: α = 35, β = 0.25, η = 0.25, nc = 20. Topologically balanced model: α = 35, β = 0.06, η = 0.125, μ = 0.7 (implying  ). (Online version in colour.)
). (Online version in colour.)