
Figure 14.
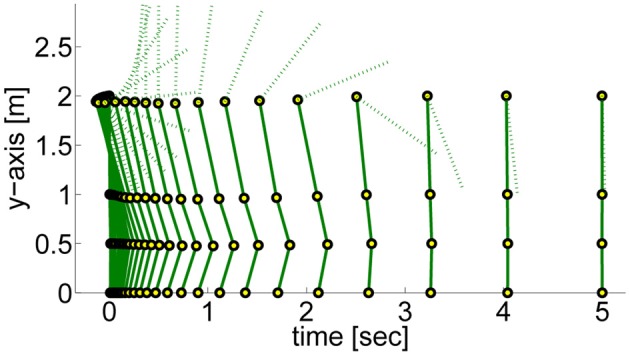
This figure illustrates a dynamic balancing movement learned using the proposed Planning Movement Primitives. The 4-link robot modelling a humanoid (70 kg, 2 m) gets pushed with the specific force (F = −25 Ns) and has to move such that it maintains balance. The circles denote the ankle, the knee, the hip, and the shoulder joint.