
Figure 1.
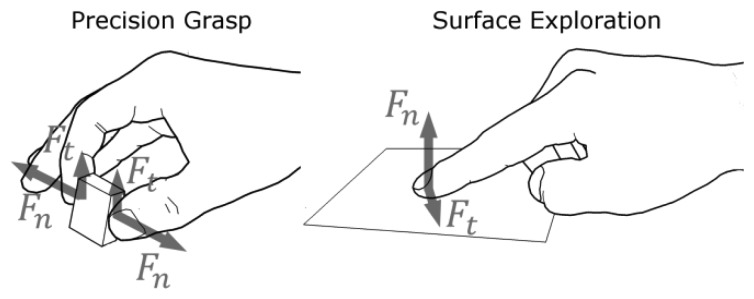
Illustration of the two types of direct finger interaction that are considered for the development of the force sensor. Precision Grasp refers to the grasping of small objects between thumb and index finger while Surface Exploration refers to the stroking of the finger on a surface to explore its qualities.